CSE 576 Computer Vision
Project 1 Feature Detection and Matching
Xinhang Shao
04/18/2013
1. Feature Detection
For
feature detection, the method is exactly the same as the one in the project
description. A 3x3 Sobel operator was used to calculate the x and y gradients.
I also tried a simple one with Ix = I[x+1,y] – I[x,y] and Iy = I[x,y+1] –
I[x,y]. It was not as good as the Sobel operator since the Sobel operator takes
weighted average of six gradients and thus smoothes the difference a little
bit. A 5x5 Gaussian mask was used to calculate the Harris matrix values
according to the gradients. The Harris operator, which is the ratio of the
determinant to the trace, gives the corner strength c at each pixel. The value c
was multiplied by 100 to get better visualization of the Harris image. There
are two requirements for a pixel to be a good feature: 1) its c value is local maximum in a 3x3
window; 2) its c value is above a
threshold. The threshold is optimized for each input image. First, find the
minimum and the maximum of c. The
initial threshold level is 0.2, which means the threshold value = min +
0.2*(max-min). Next, count the number of features that satisfy the two
requirements. If the number is larger than 1000, reduce the threshold level by
half; if the number is less than 500, increase the threshold level by half.
This iteration stops if the number of features is between 500 and 1000, or it
iterates for 10 times. Usually, the number of iteration is less than 3.
2. Feature Description
Two
kinds of feature descriptors are used.
The
first one is a 5x5 window. It takes 25 pixel values centered at the current
pixel on the converted gray image as feature descriptors.
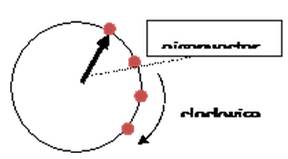
The
second one is a circular descriptor. I referred to the reports of Spring 09,
and found this idea very interesting. Actually that student got the first
place, so why not? Instead of using a square window, the circular descriptor
uses a circular window, and takes pixel values at the center of the circle (the
current pixel), as well as at circumferences with r = r0, 2*r0,
and 3*r0, as shown in the figure below. Since MOPS extracts features
from 40*40 raw data, so a reasonable guess would be r0 between 5 and
8. Samples were taken at 20 degrees apart, starting from the dominant orientation.
The dominant orientation was calculated from the eigenvector corresponding to
the larger eigenvalue. The sample pixel was rounded to the nearest integer
pixel, so a possible improvement is to use bilinear or cubic interpolation to
get more precise values.
I
tried r0 = 5, 6, 7, 8 and 10, with step angle = 20o or 30o,
and found that r0 = 6 gives the best performance using the 4
benchmark sets of images. The performance was evaluated by summing up the
average AUC of the four sets. Different images behave differently when r0
changes. For the step angle, 20o is better than 30o by
about 0.005 ~ 0.01 in terms of average AUC, and the tradeoff is more resources
due to more data points taken. This sampling method makes the feature
descriptors rotation invariant.
To
get scale invariance, the original gray image were shrunk to 1/2 x 1/2 and 1/4
x 1/4 sizes by taking out every other pixel after low pass filtering by evenly
weighted 3x3 mask. Other low pass filters could also be used.
For
both descriptors, the values were
subtracted by the mean, and then divided by the standard deviation of the
descriptor, which makes them illumination invariant.
3. Feature Matching
Two
matching methods were used. One was the given SSD method, and the other one was
ratio test, which takes (distance of the best match) / (distance of the second
best match).
4. Performance
(1)
ROC
|
|
|
|
ROC
of graf |
ROC
of Yosemite |
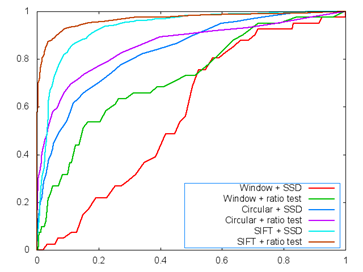
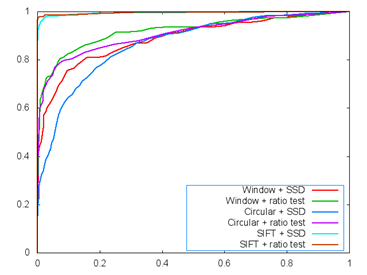
The
ROC curves are mostly as expected except some for Yosemite, which surprised me
that the circular descriptor was not better than the 5x5 window descriptor.
Again, the 5x5 window descriptor I used was also illumination invariant.
(2)
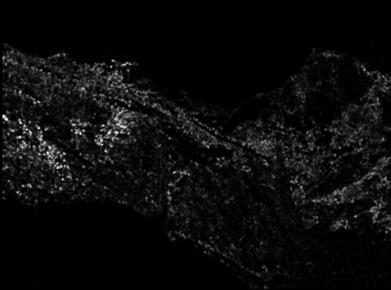
Harris value images
The
original values were multiplied by 100 to get better visualization.
|
|
|
|
Graf |
Yosemite |

(3)
AUC
Below
is a summary of the AUC of four benchmark sets. For the circular descriptor, r0
= 6, step angle = 20o.
|
|
Window
+ SSD |
Window
+ ratio |
Circular
+ SSD |
Circular
+ ratio |
|
bikes |
0.601972 |
0.617781 |
0.841025 |
0.894008 |
|
graf |
0.563350 |
0.685072 |
0.718351 |
0.748482 |
|
leuven |
0.725803 |
0.832564 |
0.858521 |
0.905749 |
|
wall |
0.744245 |
0.767936 |
0.813687 |
0.802752 |
5. Strengths and Weaknesses
(1)
My implementation is invariant to translation, which is the
property of Harris features.
(2)
It is illumination invariant, since the descriptors are
subtracted by the mean and then divided by the standard deviation.
(3)
It is rotation invariant, since values in the feature
descriptors begin with the dominant orientation.
(4)
It is scale invariant, since feature descriptors were created
for three scales of the original images.
(5)
Feature cluster is the biggest weakness of my implementation.
In SIFT methods, features distribute evenly. In contrast, my features cluster
at high frequency part, some of which are redundant. As for my circular
descriptor, one pixel of interest could have at most three descriptors, which
worsens the situation. A possible improvement of the 1-to-3 issue is suggested
in the next section, but I did not have enough time to implement it this time.
(6)
The sampling radii of the circular descriptor may affect
image differently. Generally, small radius is better for high frequency
features, and larger radius is better for low frequency features. It’s possible
to optimize the sampling radii, but may take more resources, such as time and
memory.
6. My Own Images
Here
are my own images, showing rotation and scaling. Please note that for each
pixel of interest, there are at most three feature descriptors with three
scales. However, not all of them will match the three in the other picture.
That’s why there seem to be a lot of mismatches. In the next step, we should
combine three descriptors into one (store 55*3 pixel values), and implement
another match method. That is, the match score of a pair of features is the
highest of any 1/3 feature pairs. In this way, it eliminates any redundant
feature descriptors, and will not show false mismatch in the given GUI.
|
|
|
|
Original Image |
Rotation |
|
|
|
|
Scale |
|
|
|
|
|
Harris Image |
|




7. Extra Credits
(1)
Implement the circular descriptor.
(2)
The feature descriptor is scale invariant.