
FEATURE DETECTION AND MATCHING
COMPUTER VISION (EE576), SPRING2013
Jian Ma
In this project several interesting steps of feature dection and maching was implemented. These steps including a Harris feature descriptor, image piramid to help obtaining scale/resolution invariance, and a gradientfeature descriptor. The results were then tested on several set of benchmark images. This method was then evaluated with ROC plots on its maching results and compared with other popular methods.
Feature detection and matching has various important applications on computer vision such as object tracking, image stitching and 3D reconstruction. Its performance, accuracy and robustness are usually the bottlenecks for computer vision systems and thus it is a topic with extensive research effort. This project is an attempt trying to engineer a good feature detector/descriptor with known knowledge.
| Design choice | reasoning | |
| 1 | Feature detection pyramid | Increased scale and resolution invariance change |
| 2 | Exclusion of clustered features | reduced rate of false negative errors |
| 3 | 5x5 differential descriptors | Increased lighting condition invariance |
The algorithm for feature generation is summarized below:
The algorithm was implemented in C++ on the skeleton code provided by the course. Relevant libraries were provided by Richard Szeliski in 2001. Aside from having various linker problems instantiation of template functions in my compiler, a good amount of minor details were modified in the library to ensure accurate result. The convolution routine was implemented using its definition and not optimized via Fast Fourier Transform. As most of computing were convolutions in this project, a FFT implementation of covolution could further improve algorithm performance
| DataSet | Averaged AUC | Averaged error |
| bikes | 0.763074 | 351.818781 pixels |
| graf | 0.556292 | 294.190016 pixels |
| leuven | 0.289110 | 394.819402 pixels |
| wall | 0.379246 | 367.744664 pixels |
| DataSet | Averaged AUC | Averaged error |
| bikes | 0.758166 | 351.844164 pixels |
| graf | 0.536326 | 294.361374 pixels |
| leuven | 0.512425 | 394.666906 pixels |
| wall | 0.637607 | 367.781199 pixels |
| DataSet | Averaged AUC | Averaged error |
| bikes | 0.743449 | 310.657573 pixels |
| graf | 0.537948 | 302.726848 pixels |
| leuven | 0.594175 | 279.365569 pixels |
| wall | 0.653070 | 315.959649 pixels |
| DataSet | Averaged AUC | Averaged error |
| bikes | 0.804462 | 311.124159 pixels |
| graf | 0.551508 | 302.692983 pixels |
| leuven | 0.797392 | 279.235992 pixels |
| wall | 0.784871 | 315.939953 pixels |
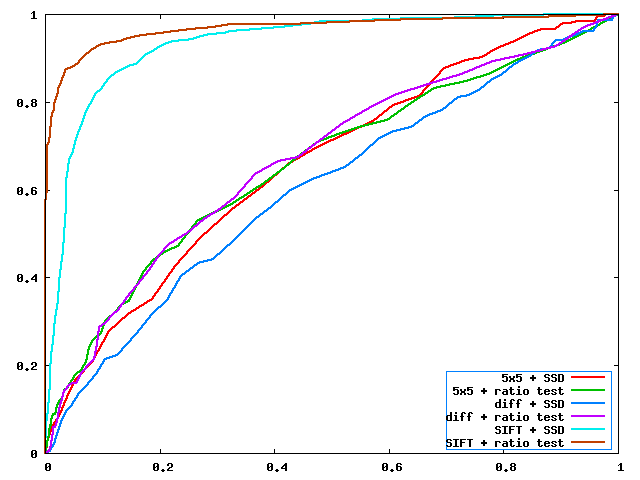
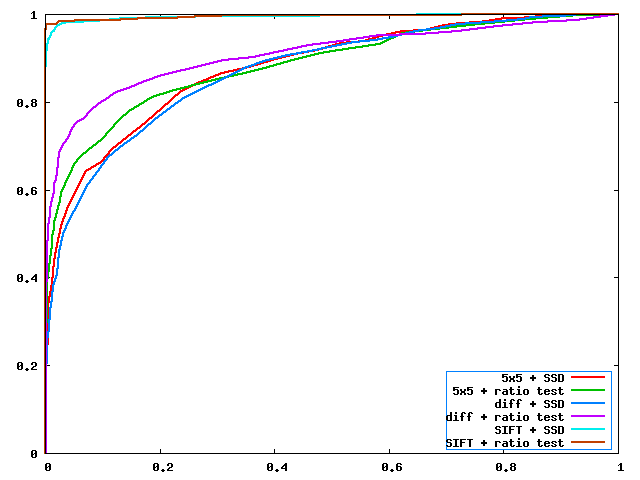
Observing results from different testbench images, I conclude that after applying gradient window descriptor, images sets with differences in illumination saw really good performance boost. This is is because the gaussian kernel acts as a low frequency filter and the gradient filtered out the DC component of the patch(illumination change invariant). Applying the ratio SSD matching increases the results in general as it takes out a good number of false posible results. However, the algorithm in general is not rotation transform invariant so that the performance is pool images with rotations.
Szeliski, Richard. Computer Vision: Algorithms and Applications. London: Springer, 2011. Print.