- Motivation
Physically based simulation of creatures can be used to generate realistic animations of them. This is because the animated creature will now be moving according to the physics law that makes motions natural. Also, information from simulation of legged creatures can be applied to various types of walking robots, and real and imaginary creatures, to study the physics of their motions, their capabilities and limits.
- Problem Definition
We model a virtual lizard-like creature, define its capabilities and desired motions, and search for set of control parameters that makes the consequential motion look natural and realistic.
- Model Definition
The lizard is designed as follows:
mass(kg) length(m) Head 3.0 0.5 Body 40.0 1.0 Leg(upper) 10.0 0.5 Leg(lower) 10.0 0.5 Tail 3.0 1.5 Every body part but the tail has friction. The joints are defined as universal joints with two degrees of freedom. The joints do not have much restriction except for the elbow joints that are designed not to bend too much inward or outward.
- Parameter Setup
We built in the following set of parameters in the model and try to find the optimal set.
- Physics of the Lizard
The torques will be applied to each joint depending on the state of lizard at each time step to generate the lizard's motion. The general outline of physics calculation is as follows:
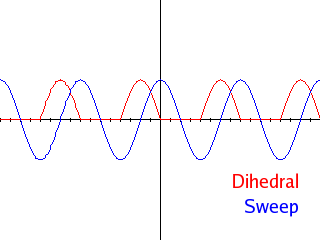
1) Each joint is assigned the desired waves that they would try to follow. Below is an example of desired dihedral and sweep angles of the legs. Note the period of the waves themselves is one of the parameters.
2) Based on such predefined desired angles and their derivatives, we calculate the torque to be applied as follows:
The result of application of torques is calculated using the Open Dynamics Engine simulation library.
- Search
A gait is a set of parameters and the walking motion produced by simulating according to the parameters. Therefore to obtain stable and natural-looking gaits, we search the parameter space for the set that produces optimal gait.
To determine the optimality of a gait, we measure forward progress and stability.
Forward Progress
We want to take efficient walking gaits that can actually move the body forward in the desired direction. We first set the metric as follows:
Later on however, we found stability is more important to find more optimal gait, therefore simplified the metric to a test whether
1) The displacement to forward direction is above certain threshold, to look at only those that make progress forward.
2) The center of body stays above certain threshold, to filter the gaits where the lizard stumbles and flips.
3) The forward displacement divided by horizontal deviation from the straight path is above certain threshold. This selects relatively straight walking behavior.
Stability
Stability means the motion gets stablized and becomes cyclic over time. We use the following information:
which means we define the pose at time t as list of distances of center of mass of each part from the center of mass of main body.
Then we can define the difference between poses as follows:
Finally using these, we define error metric as follows:
where g is a gait, T is the period of the walking cycle, and ISC is the time of initial stabling cycles.
- Variation in model
We can adjust the properties of the model to simulate real lizards. The simulation can take more parameters into account to better reflect the real lizard model.
- More motions and path following
Currently we only aim to find the most stable walking gait that follows the linear path. By defining new set of parameters and metrics, we can find running, climbing, or other interesting motions. We can also make lizards follow curved paths.
Jia-chi Wu and Zoran Popovic. 2003. Realistic Modeling of Bird Flight Animations. ACM Transactions on Graphics (TOG), Proceedings of the 30th annual conference on Computer graphics and interactive techniques, 22(3), (SIGGRAPH 2003)
Russel Smith. 2004. Open Dynamics Engine. v0.5 User Guide
David Baraff. 2001. Physically Based Modeling Rigid Body Simulation
Yongjoon Lee & Seth Cooper.