RSV – The Remote Sensory Vehicle
Brent Mikasa, bmikasa@cs.washington.edu
Curtis Mitchell, curt@cs.washington.edu
Daniel Dunham, dndunham@cs.washington.edu
Abstract:
We plan to build a remote sensory vehicle that will be capable of transmitting audio, visual and other data over radio frequencies to the user. This vehicle will be mainly a proof of concept vehicle. Its main purpose will be to develop the technology and investigate the requirements that a more special purpose vehicle may face. In production, a vehicle of this type may be useful in remote exploration in places where a person would not want to be. These places could include caverns, volcanoes or other remote areas. Also, the technology may be useful in extending the capabilities of current remote control vehicles used both for hobbies and movie making. These enhanced capabilities may make it easier for industrial model shops to make more realistic and functional models for special effects or increase the enjoyment of a modeler by allowing him to explore the world from his model's point of view.
Objectives:
To produce a radio controlled model with a turret. The turret will contain a camera with two axes of motion and perhaps other devices to be pointed at and collect data from a target. In addition, the model will have range finding equipment and possibly a GPS receiver. A remote device will control the model. This device will have some simple I/O including a VGA out and keyboard in. In addition, the control device may be able to receive input from a joystick and output telemetry data to either a PC or a Palm pilot for further processing.
Parts (preliminary):
Video (part required for full motion video):
Video encoder/decoder chips
Bluetooth Radio transceivers and coding equipment
Antennas optimized for the 2.4 GHz range (bluetooth standard)
Basic Telemetry and Sensor controls (on vehicle):
Central Processing Unit (8051?)
4-6 range finders
1-2 Robocam cameras
Accelerometer
microphone
speakers
microcontrollers for each of the sensor devices
step motors (for aiming the camera and other equipment mounted on the turret)
Controller:
XSV 300 board
Monitor
Keyboard
Joystick (?)
Cables
Possible second board for video feed and control
Platform:
RC Car Chassis
Alternative power source (battery) for the onboard equipment
Design strategy
We want to start with the basic vehicle, the RC car and learn how to control it remotely with the FPGA. After we accomplish this, the next step will be to add a few sensors and try to get telemetry data. At this stage we will probably try to incorporate the basic form of our project, including the turret and camera mountings. After the platform is in place we will then work on adding functionality. This will include the camera interface and the rest of the sensors. On the controller side, we will focus on the basic keyboard input and VGA output. After this is accomplished we will work on adding additional I/O such as a joystick and the option to output data to either a Palm Pilot or a PC. If there is still time, we may try to add additional sensor or work on making our design as modular and portable as possible.
Problem areas:
These are some problem areas that we foresee in the project.
1) Obtaining the proper chips for video encoding/decoding and for high capacity
wireless transfer.
§ Out of all the problems, this one is the one we have the least amount of control over since these parts are not readily available in the lab, and we have yet to locate a supplier who has these parts.
§ If we obtain one of the chips (either the video codec, or the transceiver/receiver) we should still be able to do streaming video, but at a reduced quality/size.
o If we don’t get the MPEG4 codec, the high bandwidth for the wireless transmission should still enable us to use the larger camera, possibly even with color. We will most likely use the MPEG2 codec in the lab in this case.
o If we don’t get the Bluetooth transceiver/receiver, the video compression will allow us to use the smallest camera and the Virtual Wire Development kit for the streaming video.
§ If we don’t obtain both of the chips, we will use the Virtual Wire Dev. Kit and the MPEG2 codec available in the lab.
2) Figuring out the control for the RC car, since we will be controlling it from a
keyboard or joystick connected to the XSV-300 board. This problem basically boils down to integrating the existing RF control of the car with our system.
§ We will need to figure out the set of control signals used by the car by “trial and error”
§ The control signals may not be easily transferable to the digital world.
§ Mapping the controls to the keyboard or joystick may be difficult
§ Receiving input from the keyboard may be non trivial.
3) Figuring out the video components of the system.
§ We will need to learn how to use the camera.
§ We need to figure out the VGA interface on the XSV-300 boards.
4) Figuring out the wireless interface/transfer protocol.
§ This will require locating the manual for the Virtual Wire Development Kit
which has no on-line documentation.
5) Power consumption. How will having six rangefinders, plus a camera, step motors,
and microcontrollers affect how much power we will need?
§ This does not seem to be too big of a problem. We do need to make sure we
have a large number of capacitors to ensure that when the sonar is recharging that it does not reset the microcontroller.
6) Logic for autonomous control. How do we determine which way to go if we hit
a obstacle? How to we incorporate autonomous control into the system? Where do we put it?
§ This question will require more research to answer. Although we would like
to put the autonomous control on the vehicle, it may have to go on the
controller itself.
§ We intend to provide the vehicle with a simple control to avoid walls utilizing
information from the range finders. We do not intend provide any mapping
features in the control but this could be a future extension.
7) Interference and compatibility issues
§ We plan on using up to three RF channels, the transceivers may interfere with
each other.
§ The chips that we plan to use may not be compatible with each other.
§ The sonar range finders may interfere with each other (the signal from one
may cause a false return). This could be solved by chaining the range finders
(one fires and gets a return, and then signals the next range finders.)
Block Diagram:
The following is a preliminary block diagram of our project.
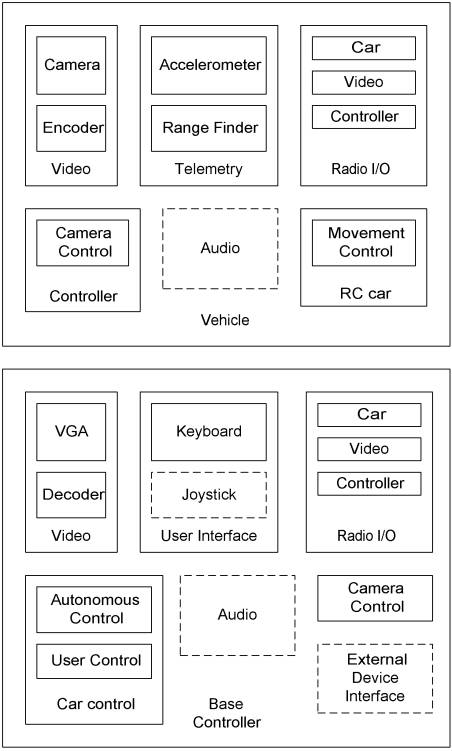
Our project consists of two main parts, the vehicle and the base controller. The vehicle will consist of an RC car with its built in controlling mechanisms, a video component, a telemetry component to ensure the vehicle will not run into obstacles, a controller for the camera position, and multiple radio transmitters/receivers for the various components.
The base controller is responsible for interpreting data sent by the vehicle and controlling the vehicles actions. It consists of a the complementary video component to the vehicle’s, multiple radio transmitters/receivers for the various components, user interface, and car control (both user defined and autonomous.)
Some possible extensions to the project are provided in dashed boxes. These include an audio system, control via joystick, and an external device interface for providing telemetry data to another system i.e. Palm Pilot or PC.