Design Explanation
Only one session is allowed at a time. A session is controlled by writing commands to the device driver e.g. writing "start session" starts a session, writing "end session" ends a session. If another user tries to start a session while one is in progress, the attempt will fail. Any number of users can have the device driver file open, but only one can have a legitimate session.
To start a session, a user must login. This is done via an html page, RobotArmLogin.html. Once a session is started, the user can control the robot arm. The page used to control the robot arm is generated by a cgi binary, robarm_control.c.
To end a session, a user must click the logout button on the robot arm
control page.
Code
The following list contains links to the c, cgi and html code for the Evil Robot system.
- robarm.c (the device driver)
- robarm_control.c (cgi)
- robarm_login.c (cgi)
- robarm_logout.c (cgi)
- robarm_resetsession.c (cgi)
- robotarmfailedlogin.html (html)
- robotarmlogin.html (html)
- robotarmlogout.html (html)
- robotstyle.css (css)
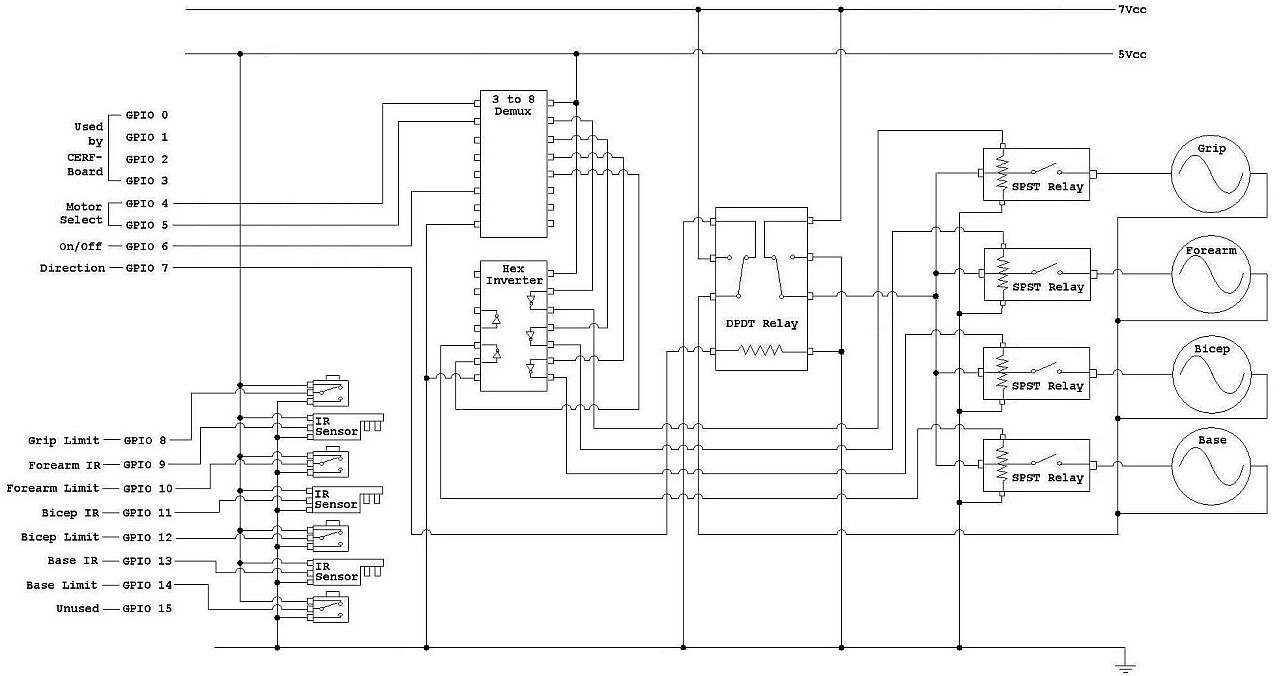
Schematic
The following schematic was created using Microsoft Paint. Using Paint
to do this was tedious and boring, but at least it doesn't crash like
DesignWorks. Click on the image to see a readable image:
Evil Robot in Action
We don't have any pictures right now because
Evil Robot broke the digital camera.
Evil Robot can be a handful!
Future Work
In the future, with very slight modification, Evil Robot will be eventually take over the world. If this proves to be impossible (unlikely), then Evil Robot will eventually take over the hardware lab. Using scrap parts and miscellaneous hardware, Evil Robot will be able to build clones able to communicate with eachother. Evolution will ultimately occur, and the Evil Robots will develop into a complex society, much like our own. One day, (Evil Robot willing), Cse466 will be taught to Evil Robots, by Evil Robots. This will not be a computer engineering class, per se, but rather a history class, so that Evil Robots will learn of their origins.