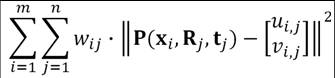
SfM objective function
•
Given point
x
and rotation and translation
R
,
t
•
•
•
•
•
Minimize sum of squared reprojection errors:
predicted
image location
observed
image location