Solving for rotations and translations
•
•
•
•
•
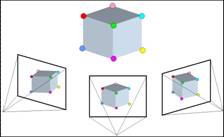
Structure from motion (SfM)
•
Unlike with panoramas, we often need to
solve for
structure
(3D point positions) as well
as
motion
(camera parameters)
•