Applications
Dynamic programming, minimum spanning trees, and disjoint sets.
Dynamic Programming
- Identify whether a recursive algorithm can be rewritten using DP.
- Explain how unique paths can be counted using recursion and DP.
- Explain how a min-cost seam can be found using recursion and DP.
Graph data structures (like adjacency lists) and graph algorithms (like Dijkstra’s algorithm) provided reusable abstractions for addressing many kinds of problems. Reduction refers to exactly this problem solving approach: modifying the input data to a problem so that an existing algorithm can solve it.
- Reduction
- A problem-solving approach that works by reframing problem A in terms of another problem B:
- Preprocess. Take the original input to A and modify it so that it works as an input to B.
- Run a standard algorithm for problem B on this input, returning some output.
- Postprocess. Modify this output so that it can be understood as the expected output for A.
We’ve actually already seen several examples of reduction algorithms that we just didn’t call “reductions” at the time. For example, in the project, we learned that seam finding reduces to single-pair shortest paths:
- First, we constructed a
PixelGraphfrom your inputPicture. - Then, we ran a shortest paths algorithm, returning the shortest path as a list of nodes.
- Finally, we extracted the y-index of each node representing the pixels in the seam to remove.
Reduction algorithms are a very common approach to solving problems in computer science. They also work without graphs as input or context. Remember dup1 and dup2 from the first week of the course? dup1 detects duplicates in an array by checking every pair of items in quadratic time. dup2 detects duplicates in a sorted array in just linear time. The problem of duplicate detection reduces to sorting because we can just sort the array and then run dup2, which can be much faster than dup1. Inventing faster sorting algorithms doesn’t just mean faster sorting, but faster everything because so many problems reduce to or otherwise depend on sorting.
Eric Allender summarizes the importance of this insight:1
If A is efficiently reducible to B, and B is efficiently reducible to A, then in a very meaningful sense, A and B are “equivalent”—they are merely two different ways of looking at the same problem. Thus instead of infinitely many different apparently unrelated computational problems, one can deal instead with a much smaller number of classes of equivalent problems […] Nothing had prepared the computing community for the shocking insight that there are really just a handful of fundamentally different computational problems that people want to solve.
Although reductions provide a powerful way to define classes of equivalent computational problems, they don’t necessarily lead to the most experimentally-efficient solutions. The seam finding reduction to single-pair shortest paths will be limited by the runtime for shortest paths algorithms like Dijkstra’s algorithm. In practice, algorithm designers apply algorithm design paradigms like dynamic programming to develop more efficient solutions when greater efficiency is necessary.
Fibonacci sequence case study
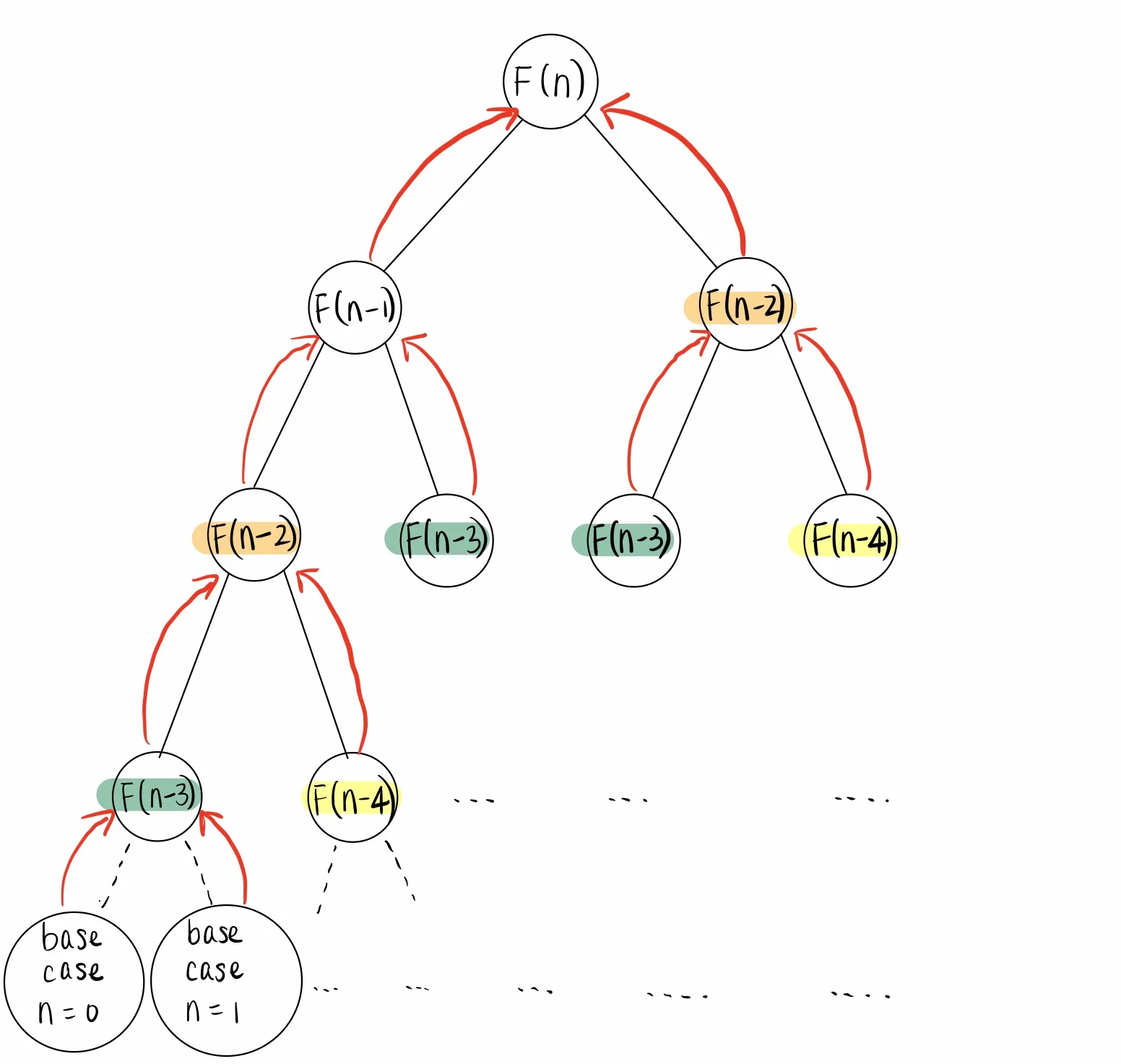
The Fibonacci Sequence is a series of numbers in which each number is the sum of the two preceding numbers, starting with 0 and 1. We can represent this rule as a recurrence: F(N) = F(N - 1) + F(N - 2) with the base cases F(0) = 0 and F(1) = 1.
By converting this recurrence into a program, we can compute the Nth Fibonacci number using multiple recursion.
public static long fib(int N) {
if (N == 0 || N == 1) {
return N;
}
return fib(N - 1) + fib(N - 2);
}
We can draw a recursion tree diagram to visualize the process for computing fib(N). Each node in the diagram represents a call to fib, starting from F(N), which calls F(N - 1) and F(N - 2). F(N - 1) then calls F(N - 2) and F(N - 3), and so forth. Repeated subproblems are highlighted in different colors.
Top-down dynamic programming
To save time, we can reuse the solutions to repeated subproblems. Top-down dynamic programming is a kind of dynamic programming that augments the multiple recursion algorithm with a data structure to store or cache the result of each subproblem. Recursion is only used to solve each unique subproblem exactly once, leading to a linear time algorithm for computing the Nth Fibonacci number.
private static long[] F = new long[92];
public static long fib(int N) {
if (N == 0 || N == 1) {
return N;
}
if (F[N] == 0) {
F[N] = fib(N - 1) + fib(N - 2);
}
return F[N];
}
Top-down dynamic programming is also known as memoization because it provides a way to turn multiple recursion with repeated subproblems into dynamic programming by remembering past results.
| index | 0 | 1 | 2 | 3 | 4 | 5 | 6 |
|---|---|---|---|---|---|---|---|
| F(N) | 0 | 1 | 1 | 2 | 3 | 5 | 8 |
The data structure needs to map each input to its respective result. In the case of fib, the input is an int and the result is a long. Because the integers can be directly used as indices into an array, we chose to use a long[] as the data structure for caching results. But, in other programs, we may instead want to use some other kind of data structure like a Map to keep track of each input and result.
Bottom-up dynamic programming
Like top-down dynamic programming, bottom-up dynamic programming is another kind of dynamic programming that also uses the same data structure to store results. But bottom-up dynamic programming populates the data structure using iteration rather than recursion, requiring the algorithm designer to carefully order computations.
public static long fib(int N) {
long[] F = new long[N + 1];
F[0] = 0;
F[1] = 1;
for (int i = 2; i <= N; i += 1) {
F[i] = F[i - 1] + F[i - 2];
}
return F[N];
}
After learning both top-down and bottom-up dynamic programming, we can see that there’s a common property between the two approaches.
- Dynamic programmming
- An algorithm design paradigm for speeding-up algorithms that makes multiple recursive calls by identifying and reusing solutions to repeated recursive subproblems.
Minimum Spanning Trees
- Trace Prim’s algorithm to find a minimum spanning tree in a graph.
- Compare and contrast Prim’s algorithm and breadth-first search.
- Apply the super-source node pattern to simplify graph problems.
The minimum spanning tree (MST) problem is about finding a spanning tree of minimum total weight in a connected and weighted undirected graph.
- Spanning tree
- A tree that connects all the vertices in an undirected graph.
- Tree (graph theory)
- A selection of vertices and edges in an undirected graph where there is only a single path between any two vertices.
Prim’s algorithm
Prim’s algorithm for finding an MST builds on the foundation of Dijkstra’s for finding an MST. Just like Dijkstra’s, Prim’s algorithm starts from a given vertex and gradually builds the tree structure on each iteration of the while loop. But there is 1 major difference:
- Earlier we learned that Dijkstra’s algorithm gradually builds a shortest paths tree on each iteration of the while loop. Prim’s algorithm does this similarily but instead selects the next unvisited vertex based on edge weight alone for the MST, whereas Dijkstra’s algorithm selects the next unvisited vertex based on the sum total cost of its shortest path.
In short, Prim’s algorithm builds a MST by repeatedly choosing the next-smallest edge to an unvisited vertex. The algorithm is finished once all the reachable vertices are visited.
Review the comments in this code snippet to identify how each difference appears in Prim’s algorithm.
public class PrimMST<V> implements MSTSolver<V> {
// Same edgeTo map as in Dijkstra's for shortest paths trees.
private final Map<V, Edge<V>> edgeTo;
// Same distTo map as in Dijkstra's for shortest paths trees.
private final Map<V, Double> distTo;
public PrimMST(Graph<V> graph) {
edgeTo = new HashMap<>();
distTo = new HashMap<>();
// The MST problem does not specify a start vertex.
// But, like Dijkstra's, Prim's algorithm requires a start vertex, so pick any vertex.
V start = graph.randomVertex();
// Unvisited vertices are considered in order of edge weight.
MinPQ<V> perimeter = new DoubleMapMinPQ<>();
perimeter.add(start, 0.0);
Set<V> visited = new HashSet<>();
while (!perimeter.isEmpty()) {
// Remove the next-smallest weight vertex from the perimeter.
V from = perimeter.removeMin();
// Mark a vertex as visited only after it's removed from the perimeter.
visited.add(from);
for (Edge<V> edge : graph.neighbors(from)) {
V to = edge.to;
double oldWeight = distTo.getOrDefault(to, Double.POSITIVE_INFINITY);
// Check that we haven't added the vertex to the MST already...
// Diff 1. AND this edge weight is better than the previous best edge weight to this vertex
// (infinity if this vertex has not been encountered before).
if (!visited.contains(to) && edge.weight < oldWeight) {
edgeTo.put(to, edge);
// Diff 1. Store the edge weight rather than distance from start.
distTo.put(to, edge.weight);
perimeter.addOrChangePriority(to, edge.weight);
}
// This entire if block is called "relaxing" an edge.
}
}
}
/** Returns a collection of edges representing a minimum spanning tree in the graph. */
public Collection<Edge<V>> mst() {
return edgeTo.values();
}
}
Cut property
How do we know Prim’s algorithm works?
- Prim’s algorithm stores all the next potential vertices to visit sorted by lowest-cost edge weight. In each iteration of the
whileloop, Prim’s algorithm grows the MST-in-progress by 1 vertex.
When Prim’s algorithm “grows the MST-in-progress” by selecting the lowest-cost edge to an unvisited vertex, it’s actually applying the cut property.
There are three key terms to define about the cut property.
- Cut
- A partitioning of the vertices of a graph into two non-empty sets.
- Crossing edge
- An edge that has one endpoint in each set of a cut.
- Cut property
- The idea that, for any cut, a minimum-weight crossing edge must be in an MST.
Prim’s algorithm can be understood as a repeated application of the cut property.
- Start with a single vertex in one set and every other unvisited vertex in the other set.
- On each iteration of the
whileloop, apply the cut property to choose the minimum-weight crossing edge. This expands the visited set by taking 1 vertex from the unvisited vertices. - Once the
whileloop is done and all reachable vertices have been visited, return the MST.
Disjoint Sets
QuickFindUF.javaQuickUnionUF.javaWeightedQuickUnionUF.java
- Trace Kruskal’s algorithm to find a minimum spanning tree in a graph.
- Compare Kruskal’s algorithm runtime on different disjoint sets implementations.
- Describe opportunities to improve algorithm efficiency by identifying bottlenecks.
A few weeks ago, we learned Prim’s algorithm for finding a minimum spanning tree in a graph. Prim’s uses the same overall graph algorithm design pattern as breadth-first search (BFS) and Dijkstra’s algorithm. All three algorithms:
- use a queue or a priority queue to determine the next vertex to visit,
- finish when all the reachable vertices have been visited,
- and depend on a
neighborsmethod to gradually explore the graph vertex-by-vertex.
Even depth-first search (DFS) relies on the same pattern. Instead of iterating over a queue or a priority queue, DFS uses recursive calls to determine the next vertex to visit. But not all graph algorithms share this same pattern. In this lesson, we’ll explore an example of a graph algorithm that works in an entirely different fashion.
Kruskal’s algorithm
Kruskal’s algorithm is another algorithm for finding a minimum spanning tree (MST) in a graph. Kruskal’s algorithm has just a few simple steps:
- Given a list of the edges in a graph, sort the list of edges by their edge weights.
- Build up a minimum spanning tree by considering each edge from least weight to greatest weight.
- Check if adding the current edge would introduce a cycle.
- If it doesn’t introduce a cycle, add it! Otherwise, skip the current edge and try the next one.
The algorithm is done when |V| - 1 edges have been added to the growing MST. This is because a spanning tree connecting |V| vertices needs exactly |V| - 1 undirected edges.
You can think of Kruskal’s algorithm as another way of repeatedly applying the cut property.
- Prim’s algorithm
- Applied the cut property by selecting the minimum-weight crossing edge on the cut between the visited vertices and the unvisited vertices. In each iteration of Prim’s algorithm, we chose the next-smallest weight edge to an unvisited vertex. Since we keep track of a set of visited vertices, Prim’s algorithm never introduces a cycle.
- Kruskal’s algorithm
- Instead of growing the MST outward from a single start vertex, there are lots of small independent connected components, or disjoint (non-overlapping) sets of vertices that are connected to each other.
Informally, you can think of each connected component as its own “island”. Initially, each vertex is its own island. These independent islands are gradually connected to neighboring islands by choosing the next-smallest weight edge that doesn’t introduce a cycle.1
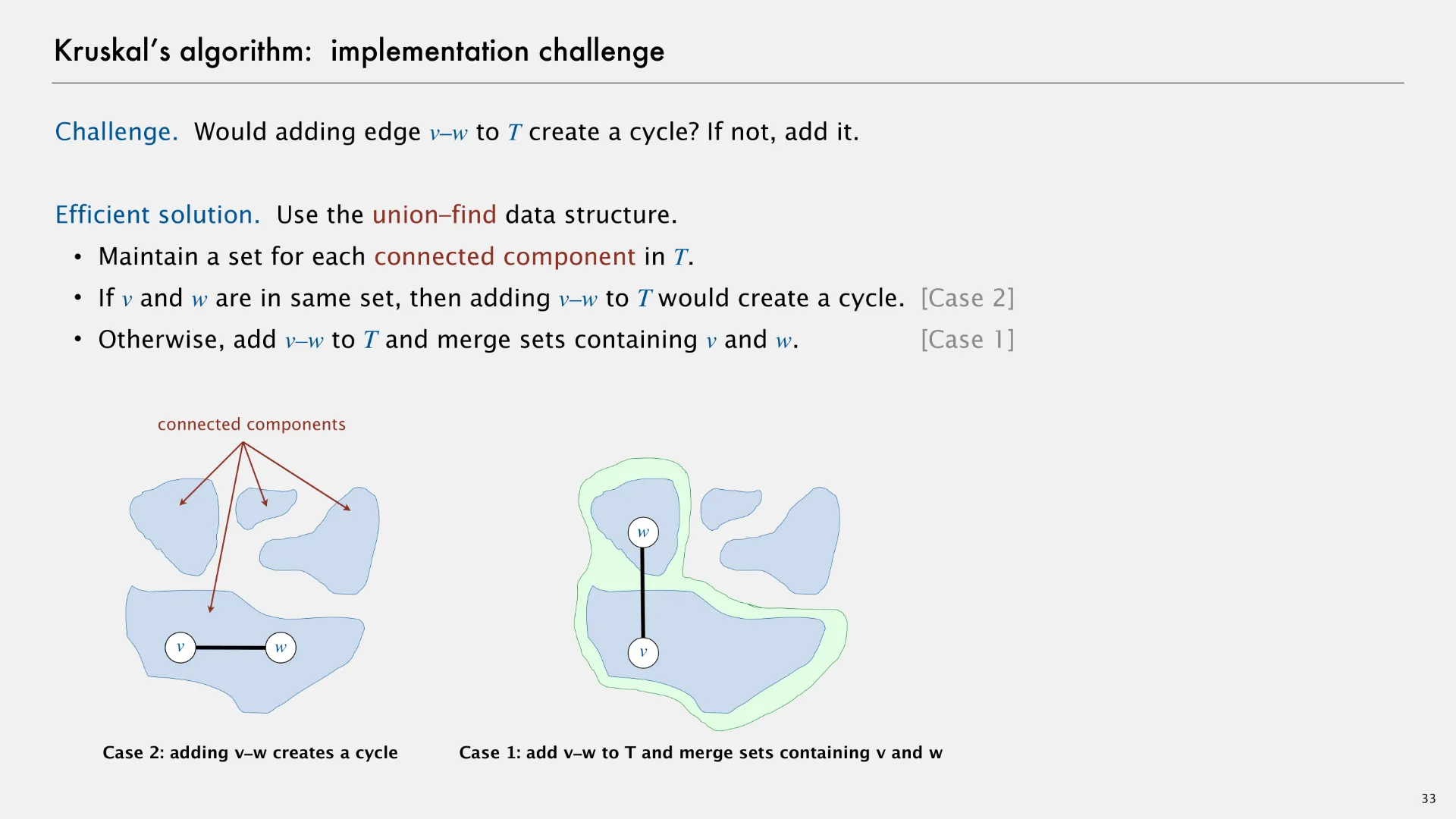
In case 2 (on the left of the above slide), adding an edge v-w creates a cycle within a connected component. In case 1 (on the right of the above slide), adding an edge v-w merges two connected components, forming a larger connected component.
Disjoint sets abstract data type
The disjoint sets (aka union-find) abstract data type is used to maintain the state of connected components. Specifically, our disjoint sets data type stores all the vertices in a graph as elements. A Java interface for disjoint sets might include two methods.
find(v)- Returns the representative for the given vertex. In Kruskal’s algorithm, we only add the current edge to the result if
find(v) != find(w). union(v, w)- Connects the two vertices v and w. In Kruskal’s algorithm, we use this to keep track of the fact that we joined the two connected components.
Using this DisjointSets data type, we can now implement Kruskal’s algorithm.
kruskalMST(Graph<V> graph) {
// Create a DisjointSets implementation storing all vertices
DisjointSets<V> components = new DisjointSetsImpl<V>(graph.vertices());
// Get the list of edges in the graph
List<Edge<V>> edges = graph.edges();
// Sort the list of edges by weight
edges.sort(Double.comparingDouble(Edge::weight));
List<Edge<V>> result = new ArrayList<>();
int i = 0;
while (result.size() < graph.vertices().size() - 1) {
Edge<V> e = edges.get(i);
if (!components.find(e.from).equals(components.find(e.to))) {
components.union(e.from, e.to);
result.add(e);
}
i += 1;
}
return result;
}
The remainder of this lesson will focus on how we can go about implementing disjoint sets.
Look-over the following slides where Robert Sedgewick and Kevin Wayne introduce 3 ways of implementing the disjoint sets (union-find) abstract data type.
- Quick-find
- Optimizes for the
findoperation. - Quick-union
- Optimizes for the
unionoperation, but doesn’t really succeed.
- Weighted quick-union
- Addresses the worst-case height problem introduced in quick-union.
Robert Sedgewick and Kevin Wayne. 2022. Minimum Spanning Trees. In COS 226: Spring 2022. ↩ ↩2